数据集
数据集
城市变化检测方法
目前存在的用于城市变化检测的方法有:ALS(无人机载激光扫描,主要用于城市规模的建筑或树木)、MLS(移动激光扫描,适合于街景研究)、TLS(地面激光扫描,适用于单棵树和建筑工地)、SfM(结构摄影测量,主要用于小面积建筑变化检测,大规模的城市研究还未确定)
也存在使用多数据源组合(ALS+SfM用于建筑物变化检测)或者多模态组合(ALS+thoimage(正射图片)用于改进不同时期的变化检测、MLS+image用于街道场景变化检测、MLS和多光束激光雷达用于街道研究)的数据集进行变化检测
常用数据集
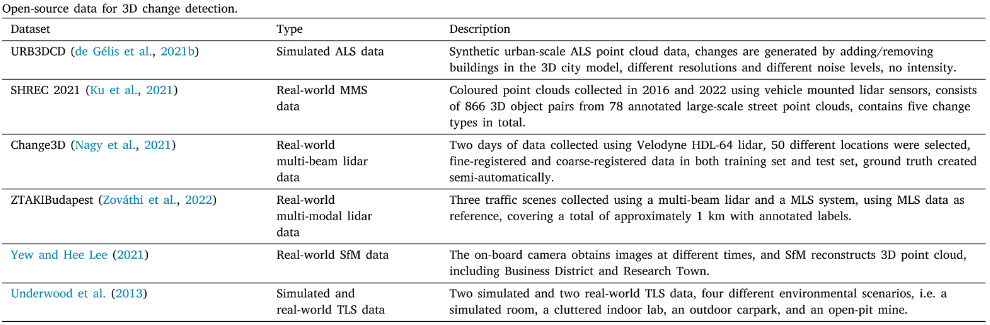
- URB3DCD
对于城市建筑变化,URB3DCD通过在模型中随机添加或移除建筑物模拟真实改编,其中dBSM、Otus阈值和形态学开放的组合(从两个时相的点云数据生成DSM,计算差分初步反应初始变化检测,利用Otsu阈值(统计图像的灰度直方图,找到阈值将像素分为前景和背景,尽可能让两类的方差和最大)进行变化检测的二值化分割,利用形态学开放运算消除噪声点)在2.5D(通常称深度图像为2.5D而不是3D)变化检测方面都优于包括2D深度学习网络在内的其他方法;在城市规模的尺度上,基于Siamese机构的KPConv能够有更好的表现。 - SHREC
对于街景变化检测,SHREC(对78个场景进行了注释,包含了866个五中变化类别的对象对,无删添和变化和颜色变化),benchmarks为一个手工探测器和两个基于学习的网络,该文章提出的SiamGCN通过随机过采样环节类不平衡问题,大大优于其他的两种网络。 - Change3D
Change3D通过随机模拟配准误差得到粗配准对,包括了50个不同位置的20000个点云对作为训练集,2000个点云对作为测试机,该文章将3D点云投影到距离图像(深度图)中并使用ChangeGAN网络,其性能优于ChangeNet和马尔科夫随机场方法。 - ATAKI
ATAKIBudapest是一个用于在线变化检测的多模型街景点云,设置了一个记住,包括三个300米长的道路场景用于可能得实时街道环境变化检测和动态分析。将基于点、体素、分割的方法和所提出的基于深度图的马尔科夫随机场方法进行了比较,分析精度和计算速度。 - ChangeDet
ChangeDet包含了两种不同的场景,不仅有着建筑施工或者拆除等大的变化,同样包含了车辆移动等小的变化,同时该篇文中提出了一种新的基于深度学习的非刚性配准方法,用于解决数据集中地理位置不准确以及SfM重建过程中可能出现的漂移问题,最终使用双阈值测试和后处理来检测视点和照明不同的两个场景中的变化。 - Underwood
Underwood提供的数据集,利用模拟多波束激光雷达和TLS提供了模拟房间、杂乱的室内实验室、室外停车场、露天矿的四个变化检测点云数据集。可以用于测试能够处理不同环境的通用方法。该文章提出了一种基于光线跟踪的多功能变化检测算法。
除了上面的六个专门用于变化检测的数据集外,其他的多时相开源数据也可以用于变化检测,如TUM-MSL(包含了粗配准TUM-MLS-2016和语义标记TUM-MLS-2018)、也可以使用模拟工具合成的数据进行,如Blender中的Blensor。